深海爬游机器人是一种综合了自主式水下机器(AUV)、遥控水下机器人(ROV)和缆控水下多足仿生机器人优势的混合型机器人。既可利用导管螺旋桨推动爬游机器人进行快速远距离的水下巡游,也可通过多肢多关节结构实现海底复杂地形中的精确移动和洋流干扰下的稳定坐底,还可在复杂的海底地形和洋流扰动下,进行稳定的海底作业。此外,在海底采用足式移动,相对轮式、履带式及螺旋桨对海底沉积物扰动小,可为所携带的探测传感设备提供更好的探测条件,便于对海底作业目标的探测和识别。
爬游机器人采用模块结构,主要包括4个组成部分:
1)平台与动力系统。
2)机械腿系统。其中,前腿可兼作机械手。
3)导航与控制系统。
4)安全抛载系统。
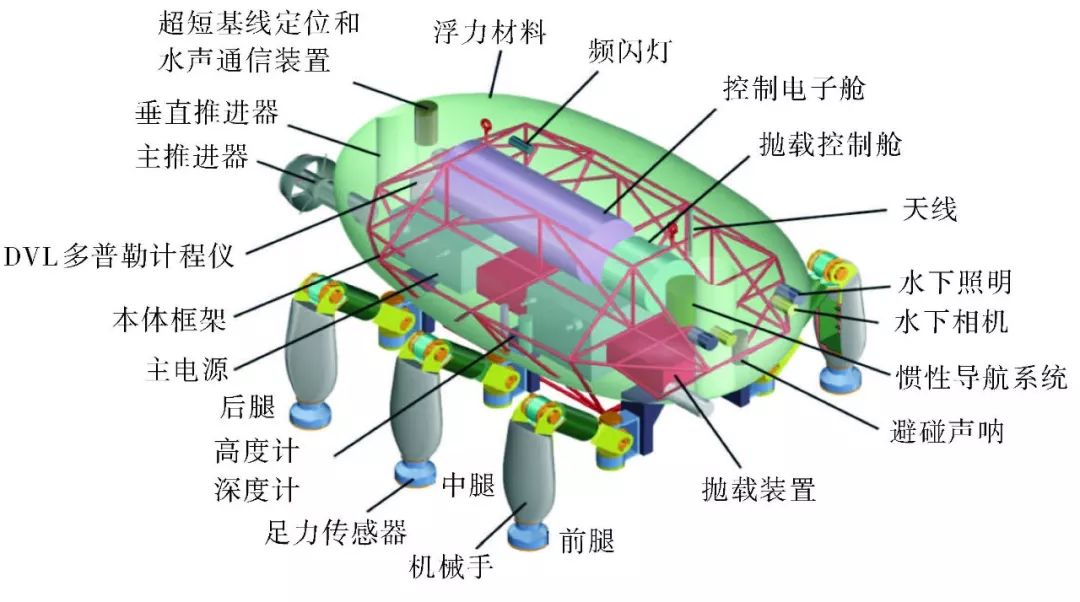
其主体结构采用框架式,6条多关节机械腿对称布置于框架下方两侧,1对导管桨推进器水平安装在框架后部。框架中部布置有容纳各类控制器件的控制电子舱,高能量密度主电源、潜浮与应急抛载系统等机构及模块位于耐压舱下面的框架结构下部。框架上不采用浮力材料填充包覆,本体部分采用非回转体流线外形,以使爬游机器人获得较好的水动力性能及站立抗扰流性能。
爬游机器人不是在现有多足机器人的基础上简单地加个螺旋桨就可以实现的,待解决的关键技术问题除了通常AUV中需要解决的水动力性能、耐压结构以及爬行机器人要解决的行走步态等关键技术外,还需解决适应其应用特点的特殊问题,包括:
1)运动姿态调节,爬游切换时的稳定控制。
2)多肢多关节协同抗扰流。
3)低能耗运动规划。
4)运动关节的高压密封。
5)总体集成与优化等。
目前,爬游机器人正在进行工程样机的研制工作。
以上为《深海爬游机器人概念及关键技术分析》一文摘要,全文见《中国舰船研究》2018年第13卷第6期,作者:陈虹,王心亮,魏伟,刘智,马哲松,郑超,唐平鹏
转载请注明:北纬40° » 中船重工719所研发深海爬游机器人