据美国媒体报道,美国海军正在试验一种创新性的反潜平台,无人驾驶反潜巡逻舰。如果试验成功,将对未来海上常规动力潜艇产生压倒性威胁,常规静音潜艇的作战优势将基本丧失。
威胁加大,催生需求
进入21世纪以来,信息技术结合人工智能的飞速发展,已经使无人驾驶技术从环境单一的太空、空中拓展到了复杂环境的水下、水面,出现了无人潜航器、无人水面艇等。随着水下和水面作战环境日益复杂,尤其是大潜深长航时无人潜航器的出现以及常规静音潜艇的大量服役,使得对水下目标的搜索更加耗时费力,反潜任务量和难度都空前加大。而美国现有的反潜兵力数量已大幅下降,已经从上世纪90年代的90多艘攻击型核潜艇、300多架P-3C反潜巡逻机,削减至现在54艘攻击型核潜艇、120多架P-3C反潜巡逻机、100架新的P-8飞机。在军费开支削减下降的大背景下,无法建造更多的有人操纵反潜平台应对越来越繁重的对潜搜索跟踪任务。因此使用无人驾驶平台实施不间断的反潜巡逻,成为必然的选择。
无人驾驶有许多优势,如可以不考虑人的生理和心理极限长时间连续工作,能有效避免人员伤亡等等,美海军正是基于无人驾驶技术和定位导航技术、卫星通信技术的成熟,看中了无人舰艇的诸多长处,决定开展这种无人驾驶连续跟踪反潜巡逻舰(ACTUV)的研制工作,该项目研究工作由美国先进防御技术研究项目代理局(DARPA)主持,具体研发工程由美国国际科技应用公司(SAIC)实施,工程目的是研发一种“无人操纵的,一次可以自动在海上几千平方公里海域范围内,连续搜寻跟踪2至3个月安静型柴电潜艇的无人舰艇”。
自主搜索,自动跟踪
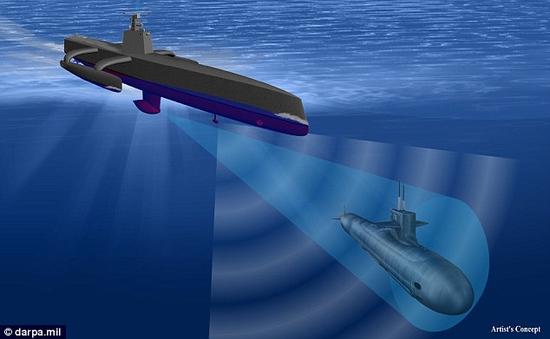
无人驾驶连续跟踪反潜巡逻舰(ACTUV)项目是基于“能够建造并使用安静型柴电潜艇的对手国家正不断增长,美国及其盟国海上安全受到的威胁持续扩大”的理由,而现实是美国的国力财力又在下降,这就决定了ACTUV的建设思路不可能高大帅和小而全,它突出了无人驾驶、海上长时间、自动搜索跟踪三项主要功能,采取集成大量现有民用技术的建造策略,船型平台为小水线面三体船,配备各种民用导航和定位设备,如商用导航雷达、自动识别系统(AIS),配备军用改进型舰壳声呐,卫星数据链通信设备,配备商用柴油发动机,不配备武器系统,价格成本控制在5000万美元之内。五级海况(浪高3-4米,风速10-13米/秒)下可以在海上自动连续执行反潜任务至少70天,续航力3800英里,七级海况下可以生存。
ACTUV舰对潜艇探测的核心设备是美国雷声公司生产的SQS-56中频舰壳声呐第五代的最新型号MS3(模块化可变声呐系统),主动有效探测距离18公里,同时具备主动和被动搜索、探测、被动威胁过滤、定位、追踪的功能,还有鱼雷探测告警和自动规避小目标的功能。为了在ACTUV舰有限空间安装MS3,雷声公司对声呐进行了重新设计改进,使用光纤和数字技术,可替换元器件数量从400个减少到15个,声呐可靠性大幅提高,维修保养更为快捷,同时对决定声呐性能的核心部件收/发阵列进行大幅度改进,使用光纤水听器,降低功耗和重量,提高其灵敏度和反应速度。
人工智能,独步世界
ACTUV舰在技术层面上有二项革命性突破。
一是在世界海军声呐探测装备中首次取消了“人在回路”,实现了对水下物体探测和跟踪的自动化、无人化。声呐具备了人的智能判断能力,需要自主决策,自我执行复杂困难的搜索和跟踪任务,声呐要开发出适合自动搜索跟踪的复杂算法,要开发出准确判定目标性质降低误警率的软件,要开发出各类水下目标的声纹数据库,要综合集成这些硬件软件并确保声呐系统的顺畅运转,需要完成大量创新性的艰苦工作,需要大量的海洋基础性实验数据做支撑,没有雄厚的技术积累是不可能完成的,美国民间公司海洋基础性工作的功底真的是世界第一。
二是海上无人驾驶自主航行的技术。无人驾驶自主航行与无人驾驶有人遥控是根本不同的二种技术,澳大利亚海军研发的海上无人攻击艇,英国海军研发的无人巡逻艇,从原理上就是无人驾驶有人遥控艇,而美国的ACTUV舰则完全智能化,自主航行,自主避碰,自主决策,基本不需要人的参与。它的自动化操纵系统要求可靠性极高,在海上必须自动服从各类海洋法规,自动遵守安全航行习惯,自动遵守船舶避碰规则。为拥有完成这些具体行动的能力,ACTUV舰还必须具备智能化通信能力、与海上相遇船只智能化语音互动识别能力等。为完成对常规静音潜艇连续跟踪的任务,在航速上ACTUV艇将具备压倒性优势,其最高航速达14节以上。
转载请注明:北纬40° » 常规潜艇“终结者”:美军无人驾驶反潜巡逻舰即将服役



